



 |
 |
 |
 |



로프구조 대회를 아시나요? 2020년 경기소방학교에서 경기도특수대응단 주관 ‘제1회 전국 로프 인명구조 경연대회’가 개최됐다. 그 이전부터 유럽이나 미대륙, 아시아의 여러 나라에서도 로프구조 대회가 열리고 있었다.
각 나라의 팀이 서로 경쟁하며 주어진 상황에서 구조대상자를 구조하는 경연대회다. 많은 참가자가 대회를 통해 각 기관(팀)과 나라의 로프구조 시스템을 공유하고 보다 효율적이면서도 안전한 로프구조 시스템을 현장 활동에 적용하려는 목적으로 대회에 참가한다.
각종 SNS나 동영상 플랫폼 속 대회 동영상 또는 사진에서는 다양한 상황에서 여러 방법으로 로프구조 시스템을 만들어 구조대상자를 높은 곳에서 지상으로 내리거나 낮은 곳에서 위로 끌어올리는 장면을 볼 수 있다.
로프구조 대회에서는 두 개의 로프를 사용하는 투 로프 시스템(Two Rope System)을 사용한다. 참가팀은 공인된 기관에서 인증된 장비를 사용하는 걸 의무화하고 있다.
일반적으로 대회 참가팀은 리더(지휘자)와 메인맨(주 로프/확보지점 관리), 빌레이맨(확보 로프/확보지점 관리), 엣지맨(모서리 관리), 구조대원(구조대상자 관리) 등 5명으로 구성된다.
하지만 각 구조대(119구조대, 산악구조대)가 현장 활동 시에는 팀 구성원의 인원수에 따라 올리기 시스템을 당기는 대원과 안전관을 추가로 구성하기도 한다.
로프구조 대회는 어떤 방식으로 경쟁할까? 로프구조 대회에 참가하는 팀은 팀별로 몇 개의 과제를 돌아가면서 해결해야 한다. 군대 유격장에서 실시하는 훈련과 비슷하다고 생각하면 된다.
과제는 여러 종류의 건물과 자연지형에서 구조상황을 모사한다. 하나의 과제 위치에 도착하면 리더는 해당 과제를 담당하는 감독관에게 과제의 구조상황(구조대상자 상태와 위치, 팀의 시작과 종료 지점, 확보지점의 상태, 기타 등등)에 대한 설명을 들은 후 궁금한 사항을 감독관에게 묻고 과제에 대해 이해한다.
그 후 제한시간 내에 구조대상자를 정해진 위치로 이동시키는 전체 절차를 평가받는데 이때 평가표에 따라 점수가 산정된다. 각 과제에서 획득한 점수를 합산한 후 다른 팀과 비교해 최종 순위를 결정한다.
평가표의 여러 항목 중 과제 해결시간(종료 지점까지 구조대상자를 이동하는 시간)이 가장 많은 부분을 차지한다. 따라서 팀 대부분은 (큰 위험요소가 발생하지 않는 한) 빨리 과제를 풀기 위해 노력한다.
과제를 풀어가는 순서는 다음과 같다.
로프구조 시스템에서 확보지점은 시스템 전체의 안전도를 크게 좌우한다. 또 확보지점의 신속한 설치 여부에 따라 구조대원의 접근시간과 전체 과제 해결시간이 좌우된다. 따라서 대회를 준비하는 많은 팀이 다양한 상황에서 빠른 확보지점을 설치하기 위해 큰 노력을 기울이고 있다.
휴먼 앵커(Human Anchor) 로프구조 동호회 GFTR(Gyeonggi-do Fire Technical Rescue team)은 2018년부터 활동 중이다. 동호회 활동을 하면서 필자는 로프구조에 대해 공부하고 있다. 로프구조에서 사용하는 각 장비의 인증 기준은 로프구조 시스템에서 안전기준이 된다.
GFTR은 2018, 2019년 대만에서 열리는 Ch’iao Rescue Competition에 참가했다. 이후 코로나19 사태가 지나고 2023년 일본 오키나와에서 열리는 2023 Ch’iao Rescue Competition에 다시 참가했다. 오키나와 대회에서는 휴먼 앵커(Human Anchor)라는 개념의 신체확보 지점을 만들어 과제를 해결해야 하는 상황이 있었다([그림 1] 참조).
대회 전 주최 측에서는 참가 팀별 대표 인원을 대상으로 사전회의를 열어 경기운영 방식과 대회 중 참고사항을 공지했다. 또 휴먼 앵커의 개념과 사용법에 대해 알려줬다([그림 2] 참조).
휴먼 앵커는 [그림 1, 2]와 같이 수직구조 작업을 수행해야 하는데 확보지점을 잡기 어렵거나 빠르게 구조대원을 투입해야 하는 상황에서 두 명의 대원이 자신의 체중으로 확보지점을 잡고 이를 이용해 구조대원 또는 구조대상자를 하강시킨다는 개념이다.
[그림 1, 2]와 같이 막혀 있는 튼튼한 난간(parapet wall)에서 대원과 들것을 내려야 하는 상황(지형)에 사용하길 권고했다.
그럼 나일론 로프와 난간 표면의 마찰로(캔버스 보호대는 최소한의 두께로 선정) 실제 하중보다 확보지점에 걸리는 무게가 줄어들어 충분히 하중을 지지할 수 있는 확보지점이 된다는 것이다.
물론 로프와 난간 표면의 마찰력을 최대화하기 위해 앵커맨 쪽의 로프와 난간 벽의 간격을 최소화하려고 노력해야 한다.
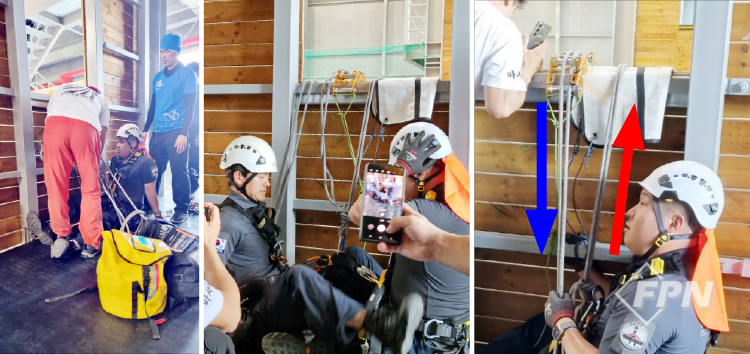
또 올리기 시스템을 설정할 땐 들것 견인 줄(bridles)에 역회전 방지 움직도르래(클러치, 마에스트로 등 추천)를 설치한다. 올리기 작업 시 [그림 2]의 적색 화살표 쪽 로프는 움직임이 없어 정지마찰력을 유지한다.
하지만 청색 화살표 쪽의 로프는 당기면 따라 올라오기 때문에 롤러 보호대 등 마찰을 최소화할 수 있는 보호대를 적용시킨다. 그리고 들것 쪽에 역회전 방지 움직도르래를 설치했기 때문에 당기는 로프(청색)는 확보점에 고정시키지 않는다.
확보점에 고정되지 않고 당기는 로프는 난간 안쪽에 도르래 시스템을 설치해 당기는 힘의 이득을 볼 수 있다. 간단하고 빠르게 확보지점을 설치하고 로프구조 시스템을 운영할 수 있는 방법이다.
과거에 우리는 필자는 2006년부터 소방관으로 근무했다. 당시 연립주택 등 2층 이상의 건물 문 개방 현장에 자주 출동했다. 그때는 하나의 구조팀이 4~5명 대원으로 구성돼 간단한 문 개방 출동의 경우 2명의 대원만 출동한 적도 많다.
현장에 도착해 복식 사다리 등을 설치했는데 해당 세대 창문으로의 접근이 불가할 때가 잦았다. 옥상에 확보지점을 설치할 곳이 없지만 창문으로의 신속한 접근이 필요할 때도 있었다.
그럼 대원 한 명이 옥상에서 확보지점(Body Belay Anchor)이 돼 건물 외벽으로 하강 로프를 설치하고 다른 한 명의 대원이 스스로 하강기로 하강한 후 창문을 통해 내부로 진입하는 식으로 활동을 했다([그림 3] 참조).
위험하지만 숙달된 대원의 경우 빠르게 로프 하강을 통해 창문으로 진입할 수 있는 효과적인 방법이다.
물체의 무게를 이용한 확보지점 (Dead Weight Anchor) 그럼 로프를 사용하는 다른 분야에서도 대원의 신체를 이용해 확보지점을 설치하는 곳이 있지 않을까?
2008년부터는 구조대원으로 근무하면서 산악구조장비 사용법을 좀 더 구체적으로 알고 싶었다. 사설 등산학교에 입교해 여러 종류의 등반1)(암벽, 빙벽, 설상) 교육을 받은 이유다.
지금 소방에서 사용하는 여러 로프구조 기술은 자연환경을 탐험하는 산악 등반기술, 계곡/동굴 탐험기술에서 비롯됐다. 아직도 여러 산악구조대의 구조기술과 안전기준을 참고한다. 산업 현장에서 사용 중인 로프 작업(Rope Access)의 안전기준도 고려한다.
실제로 산이나 야외에서 행해지는 등반 또는 계곡 탐험 등에서는 계획된 루트를 따라 움직이며 실제 사람(대원)을 이용한 신체(대원) 확보지점(Human Anchor) 사용으로 지형을 극복하고 있다.
대원 신체의 체중과 더불어 지형과 로프의 마찰을 이용한 확보지점을 만들어 사용한다. [그림 4]처럼 자연에서 사용하는 신체 확보지점의 능력을 최대한 강하게 만들려면 로프와 바위 등의 마찰력을 극대화하는 지점과 자세를 찾아야 한다.
혹자는 가장 효율적인 지점과 자세로 확보자(앵커맨)가 위치하면 1명의 대원이 약 2kN 정도의 하중을 버틸 수 있다고도 한다(참고자료 Ⅲ). 하지만 이런 방법은 지형의 경사가 가파르지 않은 곳에서 짧은 거리를 극복하기 위한 확보점으로 신체 확보지점을 사용하는 것이다.
그럼 과연 [그림 1]과 같은 수직구조 현장에서는 사람의 체중과 로프, 지점(형)의 마찰력만으로 얼마만큼의 하중을 감당할 수 있을까?
해당 기사(참고자료 Ⅲ)에는 계곡구조 현장에서 2~3명의 대원으로 확보지점을 만들어 오프셋 로프구조 시스템을 이용해 구조대상자를 아래로 이동시키는 장면을 보여준다.
로프를 사용하는 산업 현장에서도 물체의 무게를 이용한 확보지점을 사용하는지 알아봤다. 국내 규정에서는 해양 선박 등의 닻으로 사용되는 것들의 규정(재화 중량, Dead-Weight)만 찾을 수 있었다.
‘KOSHA GUIDE 33 작업의자형 달비계 안전작업 지침’에도 고정된 로프 고정점(영구적으로 설치된 확보점)에 대한 언급만 있을 뿐 데드 웨이트 앵커(Dead Weight Anchor)와 같은 자체 중량에 의한 확보점 규정은 찾지 못했다.
외국의 규정을 참고하기 위해 미국의 NFPA 코드를 찾아봤으나 관련 내용이 없었다. 그런데 유럽의 EN 795 TYPE E2)(Dead Weight Anchor for flat roofs) 규정에 이동식 확보물 중 자체 중량과 바닥표면의 마찰에 의한 확보장치 내용이 있었다.
[그림 5]의 데드 웨이트 트롤리(DWT, Dead Weight Trolley)는 EN 795 TYPE E로 인증받아 상용화된 제품이다.
DWT의 사용자 설명서(Dead Weight Trolley user information manual)를 요약해 보자. DWT는 25㎏의 중량 원판 6개(150㎏)와 28㎏의 트롤리로 구성되며 자체 질량은 총 178㎏다. 경사가 5° 이내의 미끄럽지 않은 바닥에 설치한다.
작업 제한 하중(WLL, Working Load Limit)은 200㎏으로 0.6~1.2m 높이의 (막혀 있는) 난간에 밀착되게 설치한다([그림 5] 참조).
기본적으로 1인 하중(100㎏)으로 설계됐지만 구조상황에서는 특정 권고(PD CEN/TS 164153))에 따라 2인 하중(200㎏)까지 확보지점으로 사용이 가능하다.
DWT는 지침에 따라 정확히 설치해 건물 외벽으로 하중이 걸리면 장비가 난간벽에 밀착되면서 압축되는 힘으로 하중을 지지하는 장비다.
바닥(지형)과 로프의 마찰력 크기는 얼마일까? 그럼 두께가 있는 난간에 하중이 실린 로프를 설치할 경우 난간 면과 로프 사이의 마찰력 크기는 얼마일까? 일반적으로 마찰은 주로 접촉하는 두 면의 불규칙성 때문에 일어난다.
한 물체가 다른 물체 위를 미끄러질 때 물체는 표면의 다른 물체의 불규칙하게 융기된 부분을 올라가거나 문지르게 된다. 이때 적용되는 힘이 마찰력이다. 난간 면과 로프 사이의 마찰력은 난간을 구성하는 물질의 종류(콘크리트, 금속, 나무 난간 등), 접촉면을 누르는 힘(로프에 매달리는 하중)과 관계가 있다.
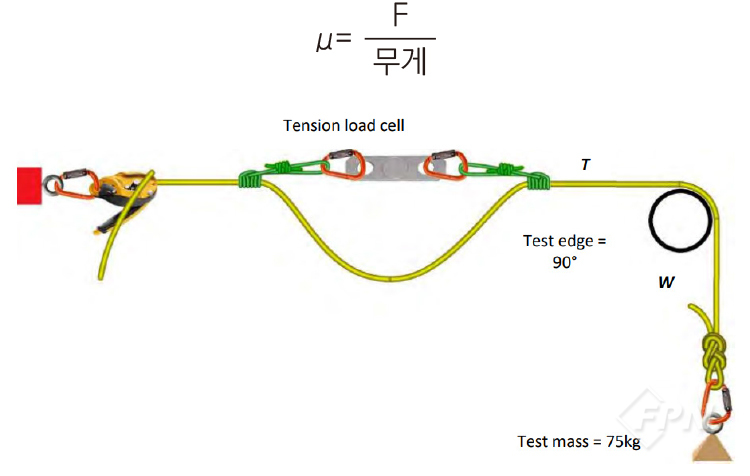
그래서 로프, 난간을 구성하는 물체와의 마찰력을 알아보기 위한 자료를 찾아봤다. 다행히도 호주의 리처드 딜레이니(Richard Delaney)의 연구가 있어 해당 자료로 얘기해 보겠다. 두 물체 사이의 마찰계수 μ(mew)와 움직이는 물체의 무게를 곱하면 물체를 움직이는 데 필요한 힘(마찰력)이 계산된다.
F=μ×무게(질량×가속도)
리처드는 [그림 6]과 같이 75㎏의 질량을 로프에 매달아 바닥으로 내리고 올리면서 필요한 장력을 장력 측정기(tension load cell)로 측정했다.
나일론 로프의 종류(sterling HTP, Edelrid SS)와 모서리 물체의 종류(금속, 나무, 콘크리트)를 바꿔가며 실험한 결과로 로프 종류와 물체 사이의 마찰계수(μ)를 계산했다.
로프와의 대략적인 마찰계수는 금속이 약 0.2, 나무가 약 0.5, 콘크리트가 약 0.4의 값이 나왔다.4) [그림 7]과 같이 콘크리트 재질의 난간에서 75㎏의 질량을 내려주기 위해선 34㎏f의 힘이 필요하다(참고자료 Ⅶ).
[그림 6]과 [그림 7]은 90°의 모서리에서 측정한 마찰계수를 고려해 계산한 필요 힘의 크기 값이다. 당연히 모서리는 표면은 날카롭지 않아야 하고 캔버스 보호대 같은 것들이 적용된다면 모서리 재질과 캔버스 보호대, 로프 사이의 마찰을 고려해야 한다.
만약 우리가 처음 이야기한 휴먼 앵커의 적용 상황처럼 로프가 90°의 모서리를 두 번 통과하는 난간 표면으로 지나간다면 하중이 걸린 로프가 지지하는 인장력은 앵커까지 두 번의 힘 감소가 있을 거다.
또 두 개의 로프를 사용하는 투 로프 시스템을 활용한다면 하중을 두 개의 로프로 나눠 부담하고 로프마다 마찰력에 의한 인장력 감소가 발생하게 된다.
그렇다면 대원 두 명의 체중으로도 충분히 두 명의 구조 하중(200㎏)을 버틸 수 있지 않을까?
로프구조 시스템에서 확보지점 확보지점은 로프구조 시스템을 연결하는 데 사용되는 움직이지 않는 지점이어야 한다. 물론 안전해야 한다. 구조대원과 구조대상자를 올리거나 내리기 작업을 지지할 수 있을 만큼 강해야 하고 최대 충격하중을 견딜 수 있어야 한다.
미국 작업 안전 위생관리국(OSHA), 미국 전문 로프 기술자 협회(SPRAT), 영국 산업 로프엑세스 협회(IRATA)와 같은 관련 전문 기준 심의기구 단체들은 약 22kN을 지지할 수 있는 확보지점을 최소한의 안전기준으로 간주한다(참고자료 Ⅷ).
일반적으로 확보지점은 현장의 나무, 돌 등을 활용하는 자연 확보지점과 기둥, 파이프 등을 사용하는 구조물 확보지점, 차량, 말뚝, 등반 장비 등을 활용하는 인공 확보지점으로 구분한다.
이 중 인공 확보지점 분류에 데드 웨이트 확보지점으로 대원(신체) 확보지점을 추가할 수 있다. 하지만 물체의 중량을 이용하는 확보지점은 다른 확보물이 없는 장소에서 로프구조 시스템을 설치할 수밖에 없는 경우나 정말로 신속하게 로프를 이용해 구조대원을 진입시켜야 하는 절박한 상황에서 마지막 수단으로 사용해야 한다.
휴먼 앵커로 설치된 로프구조 시스템에 에러가 발생하면 구조대원과 구조대상자, 앵커맨 모두 크게 다칠 수 있기 때문이다.
간편하고 빠르다는 이유로 현장에 있는 다른 확보물을 사용해 확보지점을 만들 수 있는 경우에도 대원 신체를 이용하는 휴먼 앵커의 위험성을 정확히 알고 있어야 한다.
필자도 정말로, 정말로 절박한 상황에서 휴먼 앵커를 안전하게 사용할 수 있을 만큼의 지식과 기술을 익히기 위해 동료들과 함께 더 훈련하고 연습해 나갈 예정이다.
마지막으로 최창모 전 경북소방학교 화재진압 교수님께서 자주 하시는 말씀으로 이 글을 마치겠다.
Train or Die!
1) 일반적으로 ‘등산’은 산을 오르는 모든 행위, ‘등반’은 손ㆍ장비를 사용해 산을 오르는 행위를 말한다. 2) EN 795 TYPE E: an anchor device for use on surfaces up to 5 degree from the horizontal where the performance relies solely on mass and friction between itself and the surface, e.g. dead-weight anchors 3) CEN/TS 16415, European Committee for Standardization_유럽표준위원회/Technical Specification_기술규격) 16415; Personal fall protection equipment - Anchor devices - Recommendations for anchor devices for use by more than one person simultaneously 4) 참고자료 Ⅶ에서 리처드의 실험 의도는 로프구조 시스템으로 올리기/내리기 작업을 할 때 모서리 마찰을 감소시키기 위한 고려사항(롤러 보호대, 높은 지점 등)이 필요하다는 취지를 설명하기 위함이다.
참고자료 Ⅰ) 등산(전국 등산학교 교재), (사)대한산악연맹, p.165~p.181, 2002.04.02. Ⅱ) overtheedgerescue.com/canyoning/meat-human-anchors/ Ⅲ) www.iscwales.com/Uploads/Products/UIMs/1-13-5-1310-1-DW1002-Deadweight-Trolley-UIM.pdf ⅣKHOSA_C-33-2022 작업의자형 달비계 안전보건작업 지침 Ⅴ) WAHSA TGN04(Work at Height Safety Assocition Technical Note 4) Guidance on the selection, use, maintenance and inspection of anchor devices Ⅵ) The Mechanics of Friction in Rope Rescue, Stephen W. Attaway, Ph.D. International Technical Rescue Symposium (ITRS 99) Ⅶ) Physics for Roping Technicians, Richard Delaney, RopeLab 전문 로프구조 Ⅰ(Technical Rope Rescue), 장남중, 손경완, 강원특별자치도소방학교
경기 안산소방서/GFTR_ 최기덕 : smile9096@icloud.com
<본 내용은 소방 조직의 소통과 발전을 위해 베테랑 소방관 등 분야 전문가들이 함께 2019년 5월 창간한 신개념 소방전문 월간 매거진 ‘119플러스’ 2024년 4월 호에서도 만나볼 수 있습니다.> <저작권자 ⓒ FPN(소방방재신문사ㆍ119플러스) 무단전재 및 재배포 금지>

|
많이 본 기사
|







































회원약관 ㅣ 개인정보취급방침 ㅣ 회사소개 ㅣ 주요편집방향 ㅣ 구독신청 및 결제 ㅣ 편집규약 ㅣ 윤리강령 ㅣ 기사제보 ㅣ 기사검색
FPN/소방방재신문ㆍ119플러스 | 주소: (14059)경기도 안양시 동안구 흥안대로427번길 16 평촌 디지털엠파이어 1212ㆍ1213호
인터넷신문등록번호: 경기.아51837 등록일 : 2015년 01월 21일 | 제호: FPN | 발행인: 최기환 | 편집인: 최영 | 창간일자: 1988년 7월 10일
청소년보호책임자: 윤지숙 | 대표전화: 02-579-0913 ㅣ 팩스: 070-7966-1190 ㅣ 이메일: fpn119@gmail.com
Copyright ⓒ FPN- Fire Prevention news. All rights reserved.
Contact fpn119@fpn119.co.kr for more information.

